Another revisit to my sensor glove from my first version.
This is a entire revamp! Instead of using the Arduino Nano, I moved to the Adafruit Huzzah Feather ESP32. Why? To be honest I wanted to find a reason to learn about the ESP microcontrollers and I happen to find one. Also because I require connectivity which will be explained later.
I flashed it with MicroPython. Yea I could’ve used the ESP-IDF but since I am already familar with Python and needed some rapid prototyping, I might as well right? (don’t worry I will return to ESP-IDF)
Here’s the list of components I used:
Hardware
- Potentiometer Servo Controller Glove
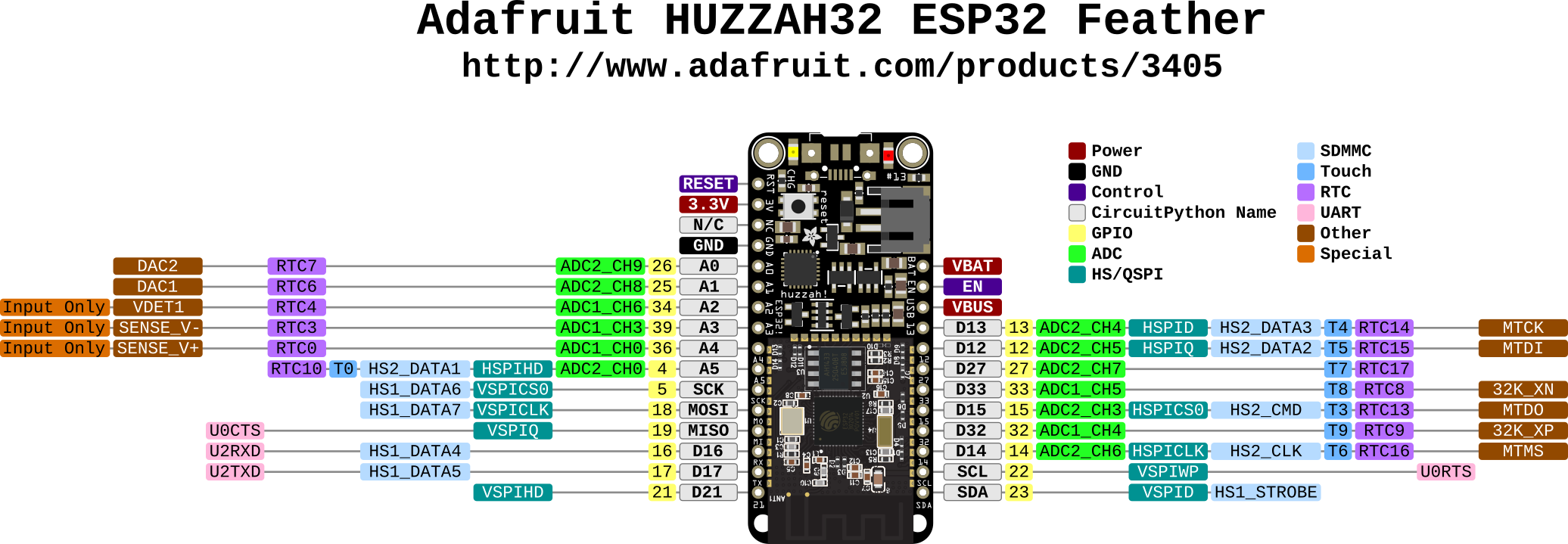
- Adafruit Feather ESP32
- 5 rotary potentiometers
- 5 - 2 pin JST connectors
- MPU9250
It’s not much but cause I’m still thinking about what else to add… I recently came across this fascinating blog that documents ALOT about sensor gloves and that will be one of my main inspirations!
Schematic And Notes
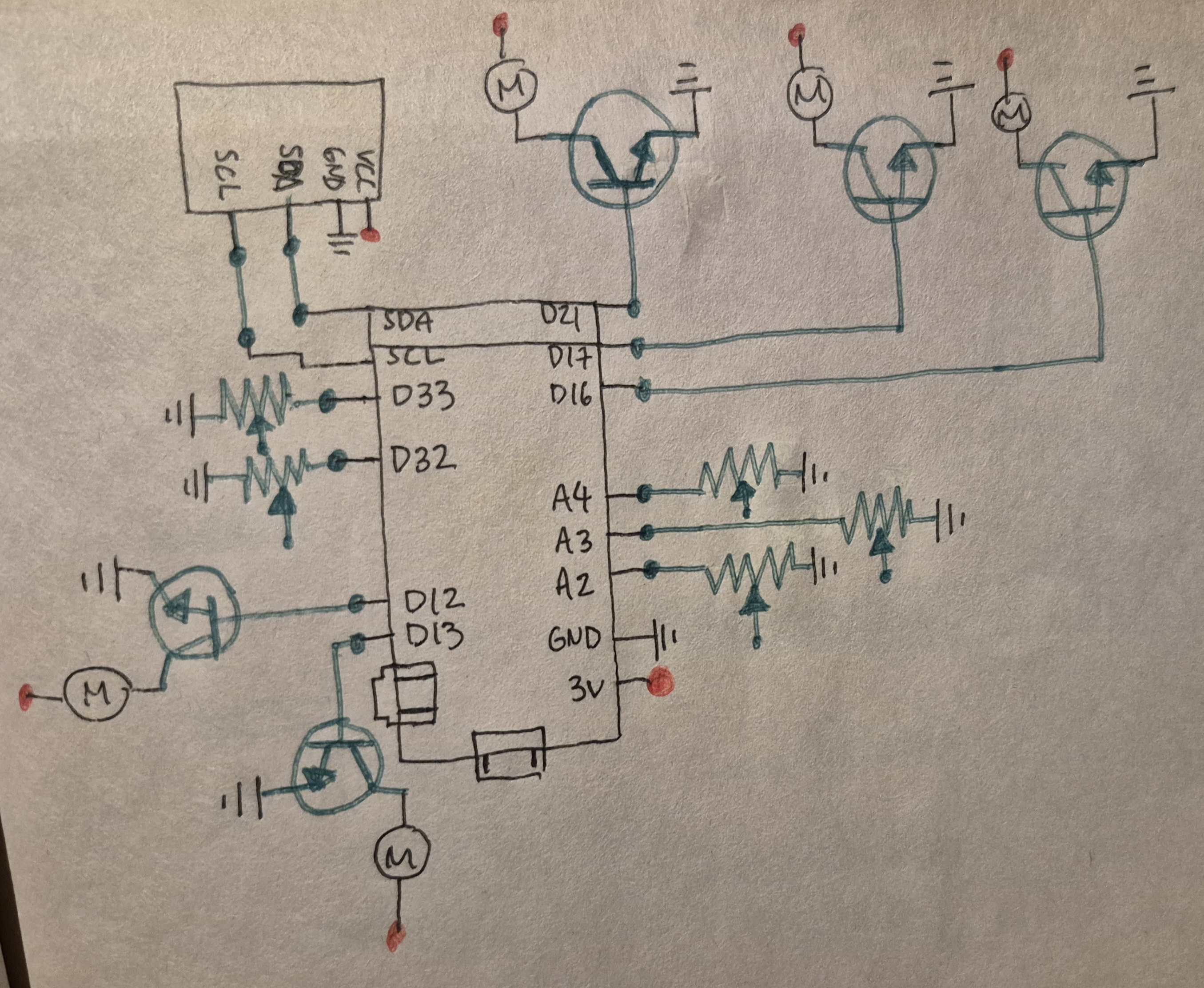
No… I didn’t leave out the vibration motors (even though I kinda did?) and the reason for that was because I was planning to integrate this into VR for haptic feedback. I looked into Unity for VR support but since I am using Linux that currently isn’t supported, so I then moved onto Monado but I realized I am jumping too far without a concrete plan and decided that this will be an afterthought once I nail down the basics first.
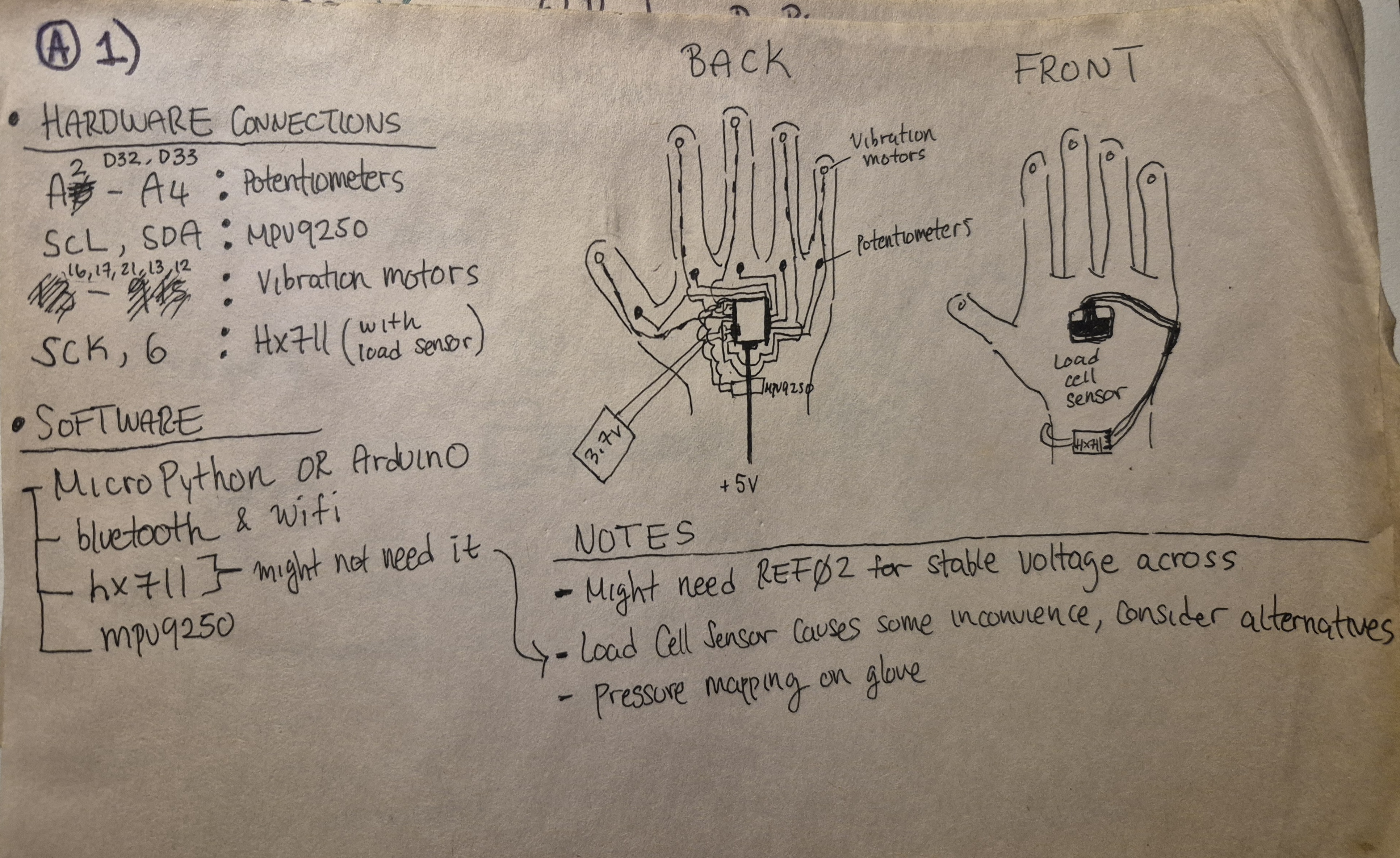
This is just my ramblings written down. In the hardware connections section, the HX711 and load sensor was meant to be placed onto the palm of the glove and reads the weight of whatever I am holding.
In the notes section, since the ESP32 only provides 3.3V I will not be able to run hardware that’s 5V, that’s why I looked into REF02. Pressure mapping is an alternative for the load sensor but I don’t know how I would be able to acheive something like that yet… I know there’s velostat but I don’t have it, what I do have is conductive fabric. I will have to look into this.
Small Showcase

If you’re wondering yes like the last glove I wrapped electrical tape around the fingers (not the wrist though!). This time it was fit the glove onto it.
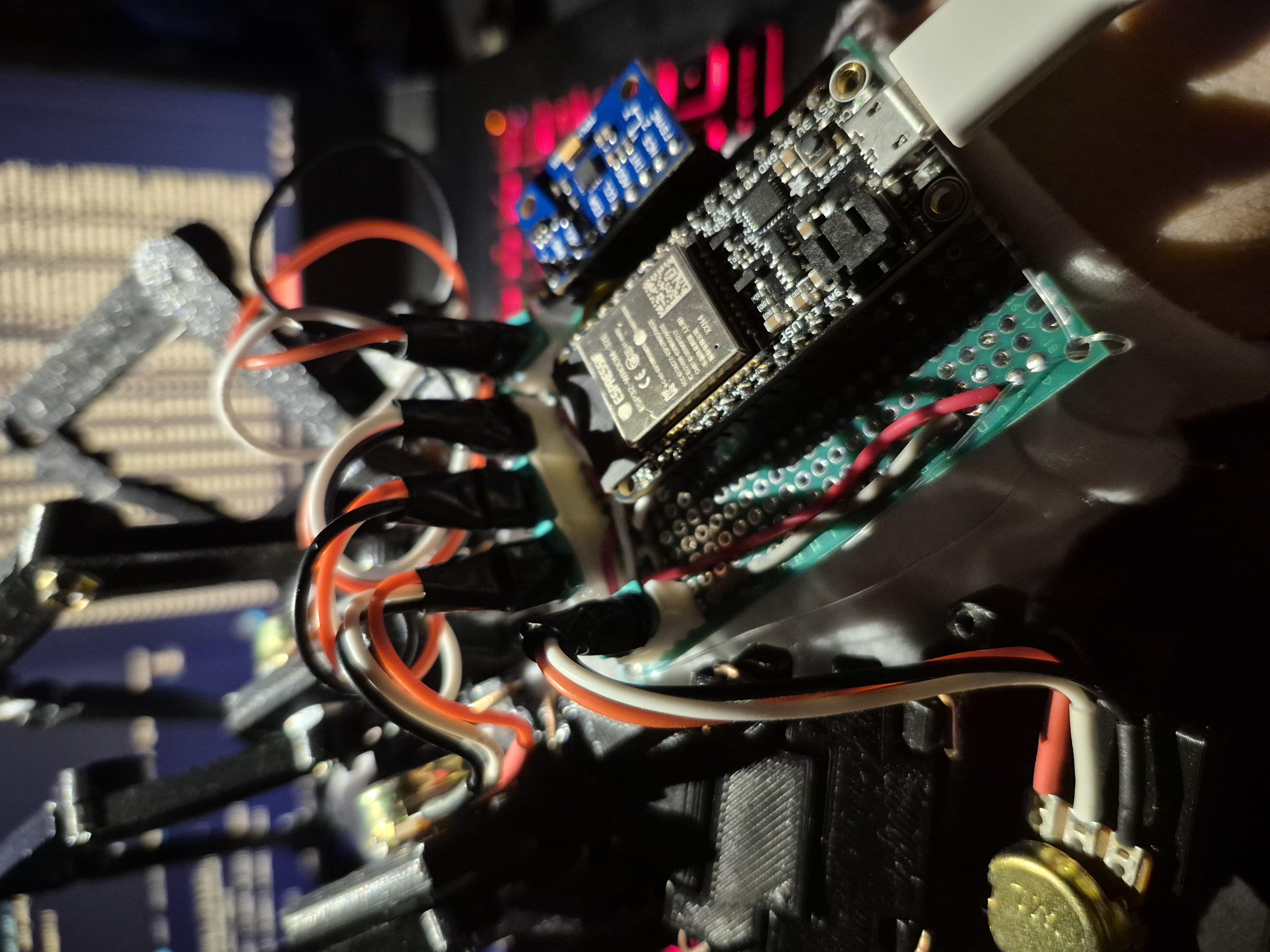
I think I love electrical tape…
Here’s Me Testing It
I wrote up a simple C server to listen to incoming connections on port 1234 from my ESP32. Whether it successfully connects to it or not, it will display data from the potentiometers and the MPU9250.
The library I used for the mpu9250
The Code For The ESP32
from machine import Pin, ADC, PWM, SoftI2C
from time import sleep
from mpu9250 import MPU9250
from ak8963 import AK8963
from math import sqrt, atan2, pi, copysign, sin, cos
import socket
def init_network(choice=0):
import network, time
# to connect to a certain network
network_creds = {
0:["SSID1", "PASSWORD1"],
1:["SSDID2", "PASSWORD2"]
}
if choice > len(network_creds):
print(f"There are only {len(network_creds)}")
return sta_if.isconnected()
else:
print(f"Connecting to {str(network_creds[choice][0])}")
sta_if = network.WLAN(network.STA_IF); sta_if.active(True)
sta_if.connect(str(network_creds[choice][0]),str(network_creds[choice][1]))
timeout = 10
while not sta_if.isconnected() and timeout > 0:
print(f"{timeout} Attempt to connect...")
time.sleep(1)
timeout -= 1
print(f"\n\nWiFi Connection: {sta_if.isconnected()}\nIP: {sta_if.ipconfig('addr4')}\n\n")
return sta_if.isconnected()
def init_pot(pin_num):
pot_AX = ADC(Pin(pin_num,Pin.IN))
pot_AX.width(ADC.WIDTH_10BIT)
pot_AX.atten(ADC.ATTN_11DB) # 11DB for 3.3v
return pot_AX
# https://stackoverflow.com/questions/70643627/python-equivalent-for-arduinos-map-function
def map_range(x, in_min, in_max, out_min, out_max):
if in_max is 0 and out_max is 0:
return x
else:
return (x - in_min) * (out_max - out_min) // (in_max - in_min) + out_min
def read_adc(adc_pin, sample=24, in_min=0, in_max=0, out_min=0, out_max=0):
cumul = 0
for _ in range(sample):
cumul += adc_pin.read()
return map_range(cumul, in_min, in_max, out_min, out_max)
# NOTE: revisit vibration motors
def init_v_motors():
v_mtr_1 = PWM(Pin(16), freq=1000, duty=512)
v_mtr_2 = PWM(Pin(17), freq=1000, duty=512)
v_mtr_3 = PWM(Pin(21), freq=1000, duty=512)
v_mtr_4 = PWM(Pin(13), freq=1000, duty=512)
v_mtr_5 = PWM(Pin(12), freq=1000, duty=512)
return v_mtr_1, v_mtr_2, v_mtr_3, v_mtr_4, v_mtr_5
def init_mpu9250():
i2c = SoftI2C(scl=Pin(22), sda=Pin(23))
mpu9250 = MPU9250(i2c)
sensor = mpu9250
# check if "calibration_variables.txt" exists within root directory
# read file and set precalibrated values
# otherwise create the text file and calibrate
try:
with open("calibration_variables.txt","r") as file_calib_vars:
print("file exists, reading...")
cali_var_lines = file_calib_vars.readlines()
offset = cali_var_lines[0]
scale = cali_var_lines[1]
print(f"\nOFFSET: {offset}\nSCALE: {scale}\n")
ak8963 = AK8963(
i2c,
offset=offset,
scale=scale
)
except OSError:
print("file does not exist, creating 'calibration_variables.txt'...\nCalibrating MPU9250 Magnetometer...")
file_calib_vars = open("calibration_variables.txt","a")
ak8963 = AK8963(i2c)
ak8963.calibrate()
offset, scale = ak8963.calibrate(count=256, delay=200)
file_calib_vars.write(f"{offset}\n{scale}")
print(f"\nOFFSET: {offset}\nSCALE: {scale}\n")
file_calib_vars.close()
# NOTE: for some reason default params don't get recognized
# so fyi explicitly define them to avoid headaches
sensor = MPU9250(i2c, None, ak8963)
print("Done.")
return sensor
# connects to port 1234 of C server
def establish_connection(ip=0):
'''
Attempts to connect to server to send glove data to
'''
ips = ['IP1', 'IP2']
try:
sockaddr = socket.getaddrinfo(str(ips[ip]),1234)[0][-1]
print(f"\nConnecting to {sockaddr}...")
soc = socket.socket()
soc.connect(sockaddr)
print(soc.recv(1024))
return soc
except OSError as e:
print(f"Connection failed: {e}\nClosing socket...")
soc.close()
return None
def sock_send_data(sock):
'''
Sends potentiometer data and MPU9250's accelerometer data
'''
if sock is not None:
x = mpu9250.acceleration[0]
y = mpu9250.acceleration[1]
z = mpu9250.acceleration[2]
return sock.send(f"{read_adc(pot_A2,1)},\
{read_adc(pot_A3,1)},\
{read_adc(pot_A4,1)},\
{read_adc(pot_D32,1)},\
{read_adc(pot_D33,1)},\
{x},\
{y},\
{z}".encode()
)
def test_hardware(test_case=0):
'''
Debug just the hardware without connecting to the server\n
0: potentiometer\n
1: mpu9250\n
2: all
'''
component_x = {
0: f"A2: {read_adc(pot_A2,1)} | A3: {read_adc(pot_A3,1)} | A4: {read_adc(pot_A4,1)} | D32: {read_adc(pot_D32,1)} | D33: {read_adc(pot_D33,1)}".encode(),
1: f"ACCEL: {mpu9250.acceleration} | GYRO: {mpu9250.gyro} | MAG: {mpu9250.magnetic} | TEMP: {mpu9250.temperature}".encode(),
2: f"A2: {read_adc(pot_A2,1)} | A3: {read_adc(pot_A3,1)} | A4: {read_adc(pot_A4,1)} | D32: {read_adc(pot_D32,1)} | D33: {read_adc(pot_D33,1)} | ACCEL: {mpu9250.acceleration} | GYRO: {mpu9250.gyro} | MAG: {mpu9250.magnetic} | TEMP: {mpu9250.temperature}"
}
return print(component_x[test_case])
net_stat = init_network(0)
# continue whether or not it's connected to wifi
# or connected to local server so
# it can be used for field testing
if net_stat or not net_stat:
pot_A2 = init_pot(34)
pot_A3 = init_pot(39)
pot_A4 = init_pot(36)
pot_D32 = init_pot(32)
pot_D33 = init_pot(33)
# init_v_motors()
mpu9250 = init_mpu9250()
print(f"MPU9250 ID: {hex(mpu9250.whoami)}")
sock = establish_connection(0)
while True:
if sock is None:
test_hardware(2)
else:
sock_send_data(sock)
sleep(0.1)